After just four weeks, we already have an operational underwater drone in hand! In the first two weeks, our team focused on defining roles, set up our workspace, and defined the technical requirements for our underwater swarm. With clear objectives in place, the next two weeks were dedicated to research, where our Swarm Control, Communication, and Localization teams developed concepts to tackle their specific tasks. Simultaneously, the hardware team began developing the first drone prototyp, working at full speed.
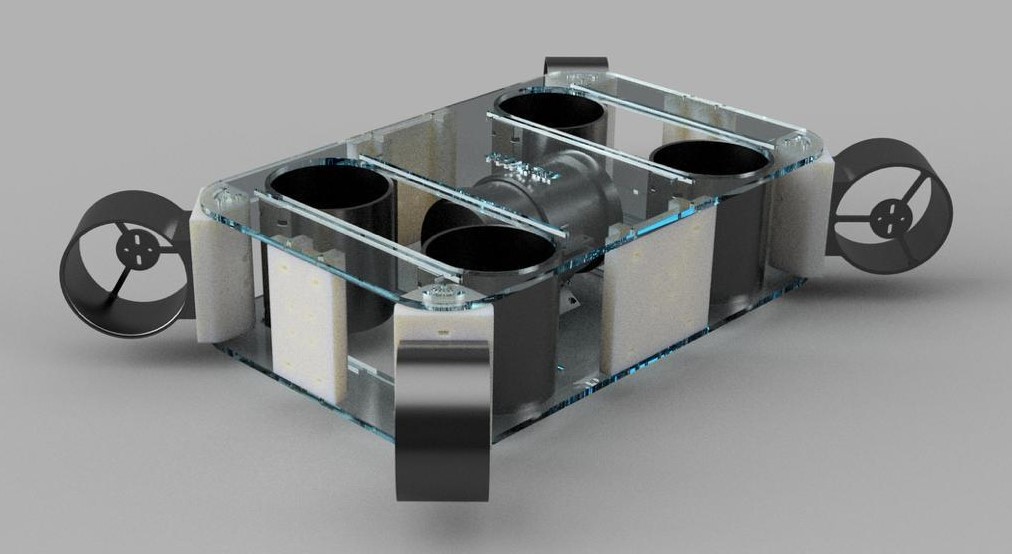
This first drone is engineered for maximum flexibility and experimentation. Featuring a robust rectangular frame, it can accommodate up to 12 motors, providing endless opportunities for testing and optimization. The design allows for dynamic motor placement: edge-mounted motors can rotate to test various angles, while internally positioned propellers can be mounted in different positions in the cutout for enhanced roll and pitch control. The four white side-plates offer mounting options for more motors, enabling experimentation with different configurations and motor counts. By leveraging 3D printing for the propeller mounts and laser cutting for the top and bottom plates, we rapidly developed this prototype, allowing us to begin with the controls for the drone.
Stay tuned as we continue pushing forward!


Social Contact